
ROS-LLM
什么是ROS-LLM?
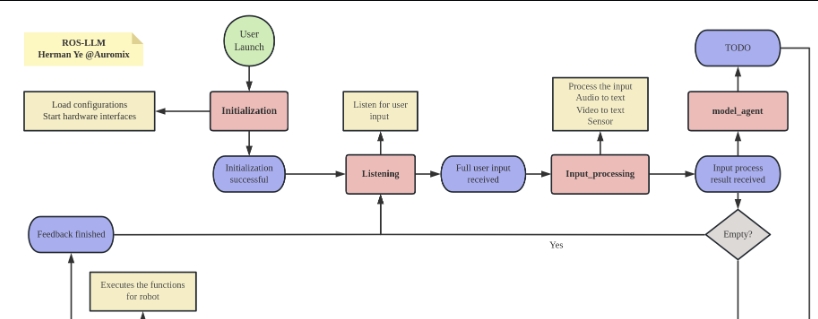
ROS-LLM是一个用于机器人应用的ROS框架,它可以通过自然语言交互和基于大型语言模型(LLM)的控制,来实现机器人运动和导航。简单来说,就是让机器人能听懂人说的话并做出相应的动作。
什么时候会用到ROS-LLM?
- 需要高级决策:当你的机器人需要做复杂决策时,比如路径规划、任务分配等,你可以通过结合GPT-4或ChatGPT这样的大型语言模型来辅助决策。
- 自然语言交互:如果希望与机器人进行对话式的交流,比如让机器人理解和执行口头指令,这个框架非常适合。
- 快速开发:当你需要快速部署和测试一个新功能时,ROS-LLM的简单接口和快速开发能力可以帮你在短时间内完成。
- 自定义机器人行为:如果你有特定类型的机器人,需要定制化其行为和功能,ROS-LLM提供了灵活的扩展接口,方便你进行个性化修改。
功能特点
- 无缝ROS集成:与ROS(机器人操作系统)无缝对接,便于机器人控制。
- 支持大型语言模型:支持像GPT-4、ChatGPT这样的LLM,为机器人提供高级决策能力。
- 自然语言交互:支持用对话方式与机器人交流。
- 灵活控制:可以通过语言模型解释,控制机器人的运动和导航。
- 简易扩展:提供简单的接口,便于机器人功能的无缝集成。
- 快速开发:可以在十分钟内创建互动和控制体验。
- 教学示例:提供详细的教程和示例,帮助用户更快上手。
- 历史存储:本地存储对话历史,方便回顾和参考。
快速开始指南
-
克隆仓库:
git clone https://github.com/Auromix/ROS-LLM.git -
安装依赖:
cd ROS-LLM/llm_install bash dependencies_install.sh -
配置OpenAI设置:
cd ROS-LLM/llm_install bash config_openai_api_key.sh -
配置AWS设置(可选):
cd ROS-LLM/llm_install bash config_aws.sh -
配置OpenAI Whisper设置(可选):
pip install -U openai-whisper pip install setuptools-rust -
构建工作区:
cd <your_ws> rosdep install --from-paths src --ignore-src -r -y colcon build --symlink-install -
运行演示:
source <your_ws>/install/setup.bash ros2 launch llm_bringup chatgpt_with_turtle_robot.launch.py -
开始监听:
ros2 topic pub /llm_state std_msgs/msg/String "data: 'listening'" -1

广告:私人定制视频文本提取,字幕翻译制作等,欢迎联系QQ:1752338621