
Dofbot Reacher
Dofbot Reacher 简介
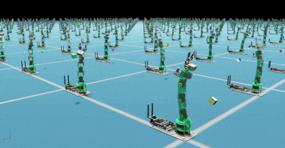
Dofbot Reacher是一个基于OmniIsaacGymEnvs环境的强化学习项目,该项目使用Omniverse Isaac Gym/Sim进行模拟训练,并将学习到的策略应用于控制真实世界的Dofbot机械臂。此项目包括基于强化学习的Sim2Real代码,能够在Linux上通过Isaac Sim 2022.1.1和ROS Melodic与真实的Dofbot进行交互。
使用场景
-
教育与研究:Dofbot Reacher项目提供了一个高仿真的仿真环境,能够用于教学和科研,帮助学生和研究人员学习和验证强化学习算法在机器人控制中的应用。
-
工业应用:可以通过强化学习进行路径规划和任务分配,优化多任务环境中机器人协作的效率。例如,工厂中的机械臂协调工作,提高生产线自动化水平。
-
机器人开发:对于机器人开发者和爱好者,此项目提供了丰富的资源和工具,能够用于开发、测试和验证新的机器人控制算法。
安装与使用
使用此项目需要满足特定的硬件和软件需求,并严格按照安装步骤进行配置。主要步骤包括:
- 安装Omniverse Isaac Sim并检查Nucleus安装。
- 克隆项目代码,并生成Dofbot的可实例化资产。
- 使用Anaconda创建和管理虚拟环境。
- 应用必要的补丁和设置。
在完成安装后,可以使用预定义的脚本进行模型训练和测试,也可以直接下载预训练模型进行推理。在实际应用中,能够将学习到的策略应用于真实的Dofbot机械臂,实现Sim2Real转换。
展示与交互
项目提供了丰富的展示和交互工具,包括:
- 预览功能:能够通过仿真环境观察Dofbot的动态行为。
- 测试功能:可以可视化学习到的策略并验证其效果。
- 交互演示:用户可以手动控制场景中的Dofbot,进行直观的交互演示。
典型应用
- 教学示范:在机器人课程中展示如何通过强化学习控制机械臂的路径规划和任务执行。
- 研究实验:进行复杂任务下的强化学习算法研究,优化机器人操作策略。
- 工业仿真:仿真工业环境中的机械臂操作,提高自动化生产线的效率和灵活性。
综上所述,Dofbot Reacher项目以其强大的仿真与实际控制融合能力,适用于教育、研究和工业应用等多种场景,为机器人控制领域提供了一套完整的解决方案。

广告:私人定制视频文本提取,字幕翻译制作等,欢迎联系QQ:1752338621