
EquiBot
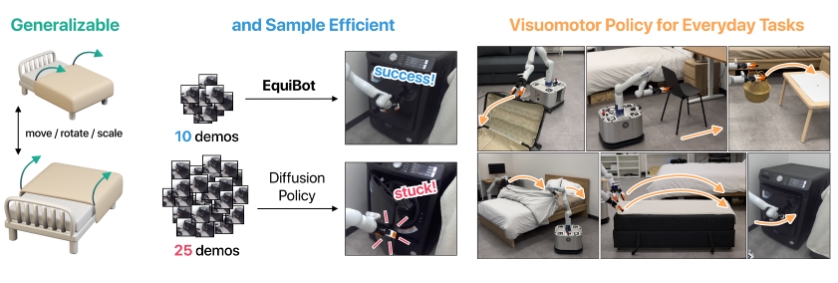
EquiBot是一种用于通用化和数据高效学习的SIM(3)-等变扩散策略。它主要是结合等变性和扩散模型的方法,针对机器学习中的复杂操作任务进行训练与模拟。这种方法能够处理三维数据并推广到不同的操作环境中,提高模型的泛化能力和学习效率。
使用场景
EquiBot可应用于多个模拟移动操控环境,例如:
- 折叠布料:模拟机器人如何折叠布料。
- 覆盖物体:模拟机器人如何使用覆盖物覆盖物体。
- 关闭盒子:模拟机器人如何将盒子关闭。
这些场景中的挑战包括处理不同的视角、尺度和旋转,从而验证模型的泛化和鲁棒性。EquiBot提供了数据生成、训练和评估脚本,以便用户可以在上述场景中进行自定义实验和研究。
主要功能
- 方法实现:包含EquiBot方法和一个以点云为输入的扩散策略基线。
- 数据生成:用户可以根据需要生成不同数量和类型的演示数据。
- 训练:提供了详细的训练指令,用于训练EquiBot模型和扩散策略基线。
- 评估:用户可以在不同的配置下评估训练好的EquiBot策略,并比较其性能。
安装与使用
- 安装:在Ubuntu 20.04环境下运行,主要依赖于Conda和PyTorch等工具。
- 数据生成:通过运行特定的脚本生成模拟环境中的演示数据。
- 训练:使用生成的数据进行模型训练。
- 评估:在不同设定下评估模型的表现,以验证其在多种环境和条件下的适应能力。
EquiBot为复杂的移动操控任务提供了一种高效且具有广泛适用性的解决方案,适用于学术研究和实际应用中的机器人学习任务。

广告:私人定制视频文本提取,字幕翻译制作等,欢迎联系QQ:1752338621