
GeoCalib
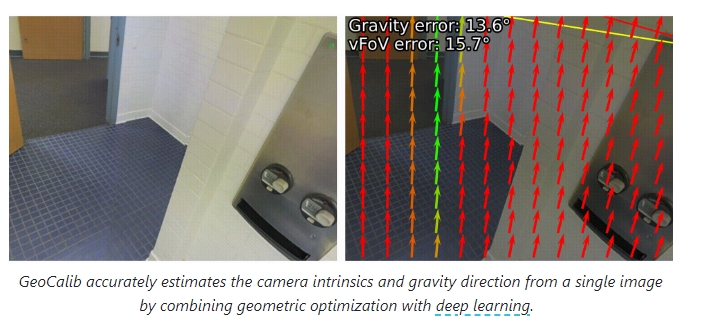
GeoCalib是一个用于单幅图像标定的算法,它可以从单一图像中精确估计摄像机的内参和重力方向。GeoCalib结合了几何优化和深度学习的方法,相较于以往的标定方式,提供了更灵活和准确的标定结果。该算法支持从不同类型的相机模型进行标定,包括针孔相机模型和带有透镜畸变的图像。
使用场景
GeoCalib可以广泛应用于计算机视觉和摄影测量领域,其主要使用场景包括:
- 摄影测量:通过单幅图像进行摄像机参数标定,提高测量精度。
- 增强现实(AR)和虚拟现实(VR):准确获取摄像机的几何信息,以便于虚拟对象与现实世界的无缝集成。
- 机器人视觉:为机器人提供准确的视觉信息,优化导航和环境感知。
GeoCalib的使用非常直接,可以通过Python库进行实现,并且支持与深度学习框架(torch)的集成。此外,它还提供了交互式演示功能,便于开发者和研究人员进行实时测试和验证。

广告:私人定制视频文本提取,字幕翻译制作等,欢迎联系QQ:1752338621